

Effizienz von Fahrer und Fahrzeugen neu definiert
IS-OPT
Einleitung
Funktionsweise
Das Hauptproblem der integrierten Planung ist die große Anzahl der Freiheitsgrade. So gibt es viele mögliche Umläufe für jedes Fahrzeug. Denn normalerweise können zwei Fahrten in demselben Umlauf sein, wenn sie hintereinander ausführbar sind, d.h. wenn es für ein Fahrzeug möglich ist, vom Ende der ersten Fahrt rechtzeitig zum Anfang der zweiten Fahrt zu kommen. Dies trifft für die meisten Paare von Fahrten zu. Für die Bildung von Fahrdiensten gilt ähnliches. Hinzu kommt, dass es viele verschiedene Regeln für die Gültigkeit von Fahrdiensten gibt. So müssen das Arbeitszeitgesetz, die Lenkzeitverordnung und eine Vielzahl von betrieblichen Vereinbarungen eingehalten werden. Viele von diesen Einschränkungen sind mathematisch nur schwer abbildbar.
Betrachtet man jetzt aber Umlauf- und Dienstplanung in einem Schritt, so multiplizieren sich die Freiheitsgrade der Einzelprobleme. Bei der sequentiellen Herangehensweise sind die zu benutzenden Leerfahren in der Dienstplanung schon festgelegt, bei einer integrierte Betrachtung jedoch müssen alle möglichen Leerfahrten auch in der Dienstplanung berücksichtigt und mit der Umlaufplanung synchronisiert werden.
IS-OPT kombiniert nun viele verschiedene Methoden der Mathematik, um mit diesen Schwierigkeiten klarzukommen. Diese Methoden kommen einerseits aus der linearen und kombinatorischen Optimierung, wie z.B. MCF, Rapid-Branching, Spaltenerzeugung und verschiedene Ansätze zum Lösen von Kürzeste-Wege-Problemen mit Ressourcenbedingungen, andererseits ist der Kern von IS-OPT eine Methode aus der konvexen Optimierung, nämlich ein
Bündelalgorithmus zum Optimieren von konvexen Funktionen. Details sind in Weider2007 zu finden
Damit wird es möglich, eine künstliche Trennung des Planungsprozesses in Einzelschritte teilweise rückgängig zu machen.
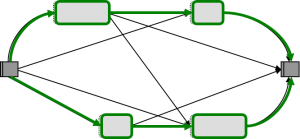 Abbildung 1 - Umlaufplanungsgraph
Abbildung 1 - Umlaufplanungsgraph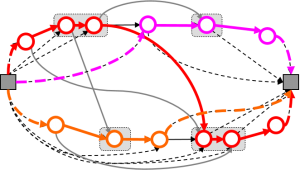 Abbildung 2 - Dienstplanungsgraph
Abbildung 2 - Dienstplanungsgraph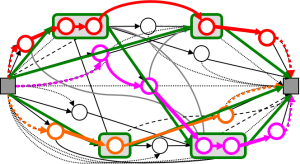 Abbildung 3 - integrierter Umlauf- und Dienstplanungsgraph
Abbildung 3 - integrierter Umlauf- und Dienstplanungsgraph
Leistungsmerkmale
Anwendung
IS-OPT ist integriert in das Planungssystem IVU.plan der IVU Traffic Technologies AG und seit über 10 Jahren bei Kunden im Einsatz. Besonders Regionalbusverkehrsgesellschaften haben große Vorteile durch den Einsatz von IS-OPT. So gehören die PostAuto Schweiz AG, ÖBB Postbus und DB Regio Bus zu Anwendern von IS-OPT.
Der Nutzen von IS-OPT ist nicht nur theoretisch enorm, sondern ganz konkret nachweisbar. So hat ein großer Referenzkunde von uns Einsparungen von über 13% der Fahrdienste und fast 6% der Fahrzeuge genannt.