

new Efficiency of drivers and vehicles
IS-OPT
Introduction
Vehicle scheduling and duty scheduling are two of the most important operational planning steps in public transport. In the vehicle scheduling phase, the use of vehicles is determined on the basis of the planned passenger trips (also called timetabled trips) and in the duty scheduling step duties for the drivers are formed. Thus, these two planning steps determine the efficiency of the use of the most important two resources of transport companies: drivers and vehicles.
Approach
If, however, one considers the vehicle and duty scheduling integrated in one step, the degrees of freedom of the individual problems multiply. In the case of the sequential approach, the connections to be used in the duty scheduling step are already defined by vehicle schedules, but in the case of an integrated view all possible connections between timetabled trips must be taken into account in the duty scheduling and synchronized with the vehicle scheduling.
IS-OPT now combines many different mathematical methods to deal with these difficulties. These methods come on the one hand from linear and combinatorial optimization, e.g. MCF, rapid-branching, column generation, and various approaches to solving shortest path problems with resource constraints. On the other hand, the core of IS-OPT is a convex optimization method, a bundle algorithm for optimizing convex functions. Details can be found in Weider2007.
This makes it possible to reverse an artificial separation of the planning process in subsequential steps.

Figure 1 – vehicle scheduling graph
Figure 2 – duty scheduling graph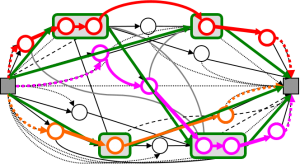
Figure 3 –
integrates vehicle and duty scheduling graph

Performance Characteristics
In addition to the equation of integration = more degrees of freedom, there are also other aspects that are less obvious, but equally important. One of these is the so-called subcontractor planning, that is, the question of which parts of an operation should be outsourced. In order to plan this outsourcing, you need to select an inherent mass of vehicle rotations that are covered by duties, thus solving an integrated vehicle and duty scheduling problem (with sequential planning this is not possible). With IS-OPT, it is possible to optimize this selection such that, in addition to operational planning, IS-OPT can also be used for decision-making support in important management questions. This increases planning quality and speed, thereby revolutionizing regional planning.
Application
The benefit of IS-OPT is not only theoretically enormous, but also very concrete. For example, a major reference customer has mentioned savings of more than 13% of the vehicles and almost 6% of the vehicles